



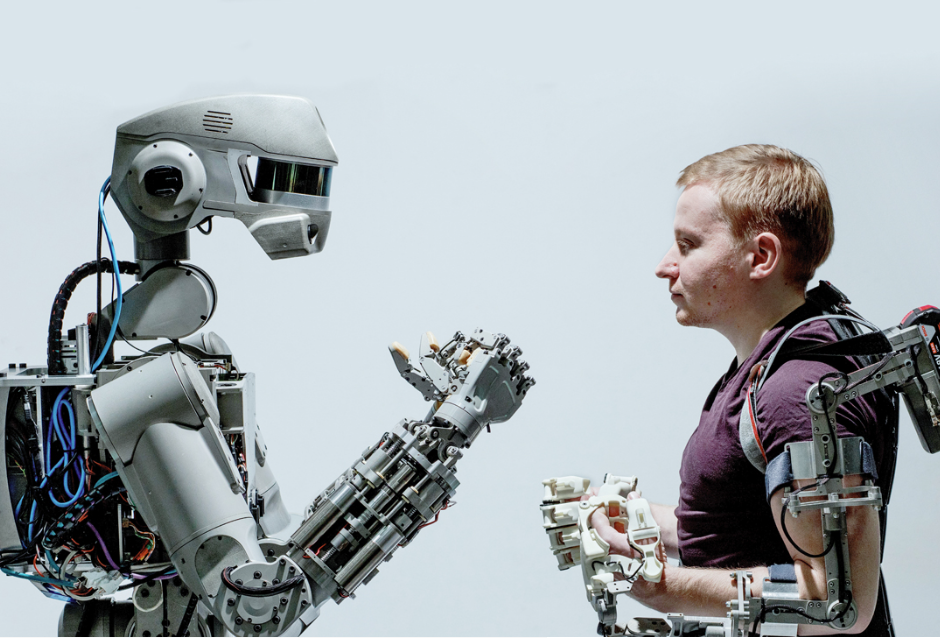
Разработали систему компьютерного зрения для антропоморфного робота «Теледроид». Широкой общественности известен его прототип F.E.D.O.R., который побывал в космосе.
Задачи, которые решает CV:
- Локализация, классификация и оценка положения объектов в пространстве;
- Распознавание надписей на дисплее стационарного пульта управления;
- Распознавание состояний переключателей и кнопок на стационарном пульте управления.
Теледроид— экспериментальный робот-помощник, который позволит сократить время пребывания человека в открытом космосе. Его задача — отработка технологий, необходимых для освоения Луны. Бенефициары проекта — научно-производственное объединение «Андроидная техника» и РКК «Энергия». Компания «Мотив» была приглашена как соисполнитель составной части опытно-конструкторской работы.
Выбор подрядчиков для проекта такого уровня ограничен рядом существенных факторов. Например, разработчик должен иметь лицензию на ведение космической деятельности, соответствовать требованиям военной приемки, пройти сертификацию Системы Менеджмента Качества (международные стандарты ГОСТ РВ 0015-002 и ГОСТ Р ИСО 9001), поэтому участие в проекте «Мотива» — не только символ признания профессиональным сообществом, но и подтверждение уникальных компетенций, требующихся для разработки перспективных технологий.
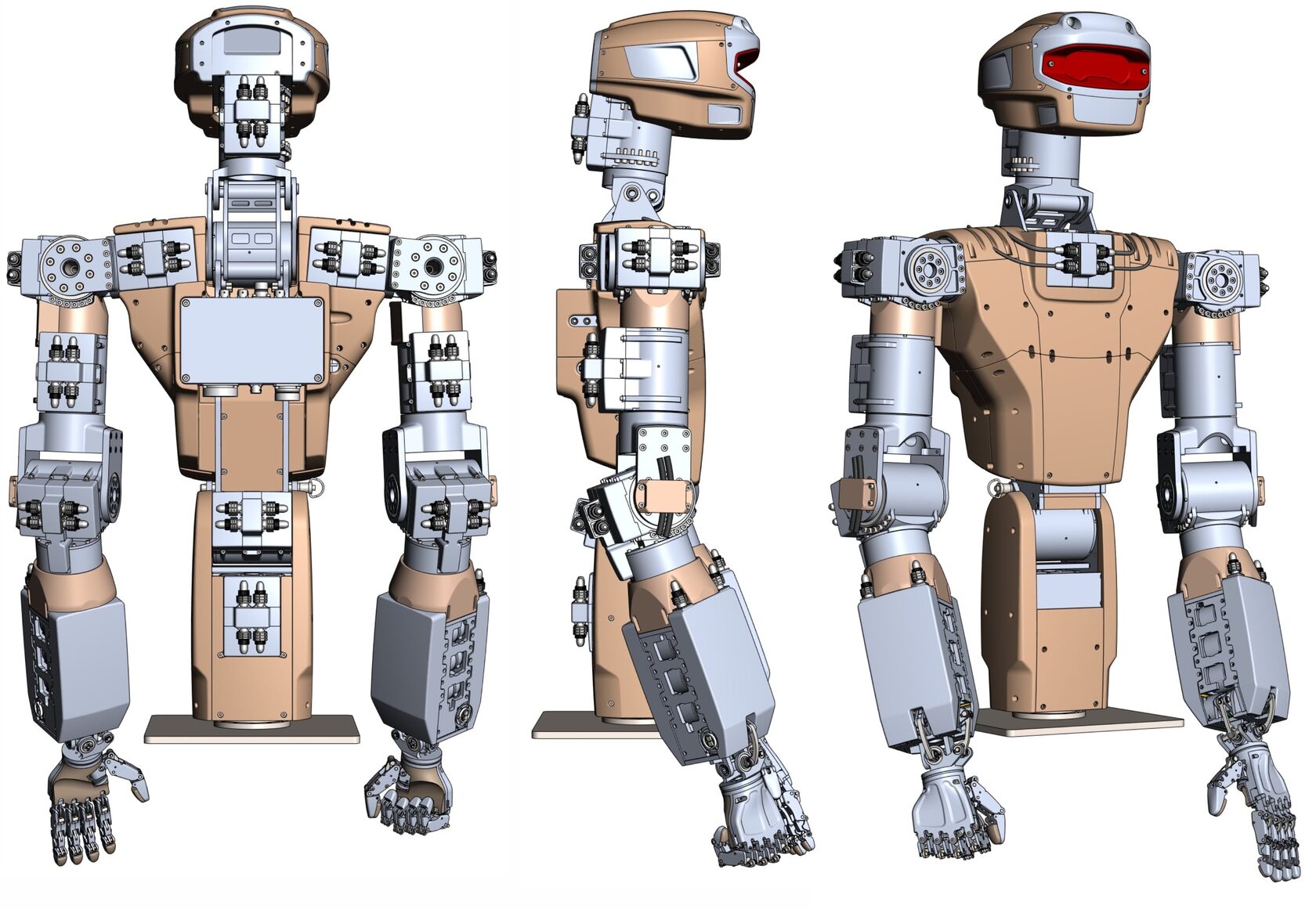
Что представляет собой Теледроид?
В отличие от классических антропоморфных роботов Теледроид не имеет нижних конечностей и стыкуется с манипулятором, который перемещается между модулями МКС. Управление устройством возможно в двух режимах — автономном и копирующем. Первый нужен для выполнения относительно несложных задач, а второй — для действий, связанных с мелкой моторикой и специфическими операциями, требующими принятия решений. Робот может управляться как с Земли, так и космонавтами на борту орбитальный станции с помощью голосового управления.
Чтобы обеспечить связь робота с внешней средой требуется система компьютерного зрения, анализирующая положение в пространстве и позволяющая распознавать предметы, необходимые для выполнения задач. Ее разработка находилась в зоне ответственности компании «Мотив».
Данные об окружающей среде поступают в процессор робота со стереокамер. Для того, чтобы обрабатывать полученную информацию, Теледроид должен идентифицировать объекты, определять их ориентацию в пространстве, распознавать названия и режимы кнопок на стационарном пульте управления. Для человеческого мозга эти задачи не вызывают затруднений, но чтобы обучить выполнять простейшие действия искусственный интеллект, требуется сложное программно-математическое обеспечение, включающее модели машинного обучения и алгоритмы обработки изображений.
Как обучить Теледроида “видеть”?
Основная сложность — для обучения нейросетей необходимо собрать от 50 до 100 тысяч фотографий каждого объекта, которые могут быть получены как в реальных условиях, так и синтезированы в лабораторных. В случае с Теледроидом, когда команда распределенная и все участники проекта находятся в разных городах, практически все данные приходится синтезировать. Однако результат такого метода превосходит все ожидания. Уровень распознавания объектов Теледроидом составляет 100%.
Еще одна особенность проекта — ограниченность вычислительных ресурсов. На Земле для хранения, обработки и передачи данных роботы могут использовать облачные технологии. Однако на орбите, где связь ограничена, устройства используют мобильные вычислители, а значит, их энергоэффективность ограничена, что требует в свою очередь оптимизации всех используемых ресурсов.
Когда Теледроид полетит в космос?
По словам Максима Харламова, начальника центра подготовки космонавтов им. Гагарина, ожидается, что летные испытания аппарата пройдут в 2025 году1. Он отправится на российский сегмент МКС. Прежде там тестировали робота F.E.D.O.R.